
Про важность пешехода в городе написано немало, но проблема того, как именно пешеходы перемещаются, какими маршрутами, как они их выбирает – крайне не изучена. Что совершенно нелогично, так как пешеход – самый главный участник транспортной структуры города. Ведь пешком ходят все.
Посмотрим на типовой сценарий жизни горожанина – выйти из подъезда, дойти до остановки общественного транспорта, проехать на транспорте, дойти от остановки до работы/учебы или магазина. Даже в жизни автомобилиста неизбежны пешеходные перемещения от подъезда до автостоянки, от стоянки до работы или магазина. Это означает, что тротуарами пользуется 100% населения.
Таким образом, пешеходы и их передвижения занимают значительную часть во всех транспортных потоках. Удивительно то, что до сих пор об этом мало кто задумывался предметно. Несмотря на то, что главенство пешехода в системе признается многими, обсуждаются лишь проблемы индивидуального или общественного транспорта, велодорожки. Однако при рассмотрении проектов и реализаций программ благоустройства или развития тротуарных сетей, становится очевидно, что о пешеходных маршрутах задумываются явно недостаточно. Результаты этого видны в любом городе на каждом шагу: вытоптанные газоны во дворах, упирающиеся в перекрестки тротуары без продолжений в виде пешеходных переходов, веером расходящиеся тропинки по газону от автобусных остановок и т.п.
Попробуем разобраться почему так происходит?
Перемещения пешехода гораздо более непредсказуемы, чем любого вида транспорта: пешеход мобильнее, он останавливается и разгоняется моментально, меняет направления движения на 360 градусов за доли секунды, для пешехода подходит любое покрытие, любое направление, а препятствием может быть только высокая стена или водоем. Из этого следует, что пешеход всегда будет передвигаться сообразно своему личному удобству и мотивам.
Остальные же участники дорожного движения вынуждены следовать заданной транспортной структуре, так как зависимы от различных факторов: одним нужны дороги с твердым покрытием, другим провода с электричеством, третьим рельсы. По этому для функционирования любой транспортной системы кроме пешеходной нужны какие-либо специальные условия, которые учитывают при проектировке генерального плана города или микрорайона.
Что касается пешеходов, то их нужды учитываются лишь радиусом доступности остановок общественного транспорта, да школы с детским садом. Простым радиусом 300 или 500 м, и не важно каким сложным и неудобным зигзагом приходится ходить пешеходам. Фокус внимания проектировщика\строителя и администрации\девелопера направлен на проработку массы условий (проектирование домов, автодорог, обеспечение нормативов и т.д.), а на разработку грамотной пешеходной сети предусматривающей удобство пешеходов просто не остается ресурсов, сил или банально внимания. Единичные удачные проекты лишь подтверждают правило.
Результат этого остаточного принципа можно увидеть в любом районе любого города, причем чем он моложе, тем больше протоптанных по диагонали газонов, срезанных углов и прочих пешеходных оптимизаций пути. Ведь как мы выяснили ранее мобильный пешеход не станет обязательно следовать предложенному маршруту, если тот будет противоречить логике его передвижений.
Еще один распространенный пример бездумного проектирования пешеходно-дорожной сети – это руководство принципом красоты, т.е. чтобы план выглядел гармонично и приглядно, опять же из-за вторичности тротуаров в общем объеме проектирования, пешеходные дорожки рисуются в последнюю очередь и часто рассматриваются всего лишь как элемент оформления чертежа. На этапе эскиза это еще может быть оправданно, но в последующей разработке проекта этому моменту следовало бы уделить внимание, но мало кто это делает в силу отсутствия времени и/или желания, и вот эти дорожки «для красоты» кочуют из эскиза в проект планировки, из проекта планировки в генеральный план, а оттуда в реализацию благоустройства.
Постановка задачи
К сожалению проблема пешеходных перемещений мало изучена. Приблизительно понятно сколько людей пользуется личным автомобилем или общественным транспортом, но как оценить пешеходные маршруты, куда их необходимо проложить и какой ширины должны быть дорожки? Какие должны быть закономерности перемещений? Конечно базово понятно, что должны быть связаны тротуарами подъезды и остановки, магазины и школы. Но их точнее расположение хорошо определяется только опытным путем, когда через газон уже протоптаны дорожки.
Интенсивность пешеходного потока измеряется только в редких случаях и чаще внутри зданий нежели снаружи. Расчеты и моделирование применяются разве только при расчете путей эвакуации из здания. Подобные симуляторы для городской среды не подходят.
Основной принцип которым руководствуются пешеходы – это минимизация длины маршрута и количества поворотов. То есть идеальный путь – это прямая от точки старта до точки финиша. Но в реальной жизни это практически не возможно: препятствия в виде домов и заборов, автомагистрали и реки задают границы возможных перемещений.
С точки зрения пешехода есть карта местности, на которой присутствуют:
- Участки с разной степенью проходимости и привлекательности – дорожки, газоны
- Препятствия – дома, заборы
- Места, между которыми пешеходы передвигаются — подъезды, ларьки, лавочки — все что угодно. Их будем называть «генераторами пешеходов»
Необходимо предсказать, где именно пешеходы будут ходить по газонам, чтобы на основе этого можно было принять решение о создании на месте возможных тропинок тротуаров с твердым покрытием.
Сразу отметим два крайних случая, которые обычно первыми приходят в голову в качестве решения:
Первый — это полный граф, то есть каждый генератор соединен с каждым, дороги проложены по прямой. Пешеходам этот вариант будет, разумеется, удобен, однако в итоге все вокруг окажется закатанным в асфальт, что не эстетично и дорого.
Второй случай — это минимальное остовное дерево графа, вершинами в котором будут генераторы.
Однако, люди все-таки не роботы и не ходят по минимальным остовным деревьям, что было показано исследователями работе «Modelling the Evolution of Human Trail Systems» (D. Helbing, J. Keltsch, P. Molnar.)
Иллюстрацией к данному утверждению может послужить следующее изображение:
Слева показана система полных путей, а справа — полученная в результате экспериментов из упомянутой выше работы система тропинок между указанными точками. Видно, что она не является ни полной, ни остовным деревом.
В итоге некоторых размышлений и изучения статей на тему симуляции движения пешеходов был придуман и реализован алгоритм симуляции пешеходных потоков.
Как работает алгоритм?
Карта местности представляется в виде навигационного графа, вес ребер которого зависит от типа местности и определяет её привлекательность для пешеходов. Вес составляется из двух компонент: фиксированной, определяемой типом местности, и изменяемой, показывающую «вытоптанность» местности в данной точки. У некоторых типов ландшафта (дорожек с жестким покрытием) изменяемой компоненты может не быть.
Запускается симуляция. Заданное количество пешеходов начинает свое движение между случайно выбранными генераторами (подъездами, автобусными остановками и магазинами). На каждом шагу симуляции:
- Пешеходы проходят определенное расстояние
- У пройденных ребер графа уменьшаются веса (вытаптываются)
- Дошедшие до своей цели пешеходы заменяются на новых
- Вес всех вытоптанных ребер в графе увеличивается на фиксированную величину (зарастание со временем)
Свой маршрут виртуальные пешеходы прокладывают с помощью алгоритма Дейкстры. При этом для симуляции разных категорий пешеходов (как любящих ходить напрямик, так и предпочитающих придерживаться дорог) используется «коэффициент порядочности».
Симуляция продолжается заданное число шагов, после её завершения карта с распределением изменяемой компоненты веса ребер демонстрирует участки, на которых пешеходы чаще всего сходят с дорожек на землю, и которые разумно было бы замостить твердым покрытием.
Проверка на существующих примерах
Для примера был рассмотрен двор, находящийся по адресу Санкт-Петербург, проспект Гагарина 14, корпус 6. Это многоэтажный дом, возведенный посередине квартала пятиэтажных панельных «хрущевок», в нем проживает больше человек, чем в нескольких соседних домах вместе взятых, однако планировка пешеходных дорожек вокруг него оставляет желать лучшего. Жители этого дома уже протоптали несколько заметных и достаточно длинных тропинок, которые удобно сравнивать с результатами симуляции.
На первом этапе работы была размечена карта местности

На втором этапе на карту накладывается сетка. Данная сетка служит основой для построения навигационного графа. Каждый узел сетки становится вершиной графа, ребра добавляются при проходимости данного участка, начальный вес ребра задается как длина, умноженная на вес территории, на которой лежит ребро.
На третьем этапе запускается собственно симуляция.
Цветные кружки — пешеходы, цвет показывает, из какого генератора они идут, линии — их маршруты движения. Красным отмечены вытоптанные участки карты.
Цифрами отмечены найденные алгоритмом вытоптанные участки, соответствующие им фотографии реального двора приведены в приложении. Как можно увидеть, соответствие достаточно точное. На результатах симуляции можно увидеть четыре основных просчета в планировке двора:
1. Отсутствие дорожки между дорогой на юге и углом дома.

2. Отсутствие прохода с севера на юг слева от дома (при этом справа от дома такой проход сделан).

3. Напротив северного подъезда нет выхода с придомовой площадки на идущую с востока на запад дорожку, выход сделан восточнее, метрах в 7. В итоге пешеходы идут напрямик по газону. В этом месте их даже не может остановить сделанная там ограда, которую регулярно ломают и снова чинят.

4. Аналогичная проблема с отсутствием выхода с угла придомовой парковки на северную дорожку, в итоге люди там лазают через невысокую ограду и полоску газона.
Применение рассматриваемого алгоритма на этапе проектирования двора могло бы заранее выявить такие недоработки и помочь их избежать, тем самым заметно повысив уровень комфорта перемещений для местных жителей.
Предложенный алгоритм симуляции движения способен хорошо предсказать поведение пешеходов из реальной жизни: при обработке плана рассматриваемого двора была построена схема тропинок, близкая к реально существующей.
Подробнее про тестирование на существующих микрорайонах читайте в статье автора алгоритма симулятора Егора Смирнова: “Разбор ошибок: Балтийская Жемчужина”.
Тестирование на проектируемом микрорайоне
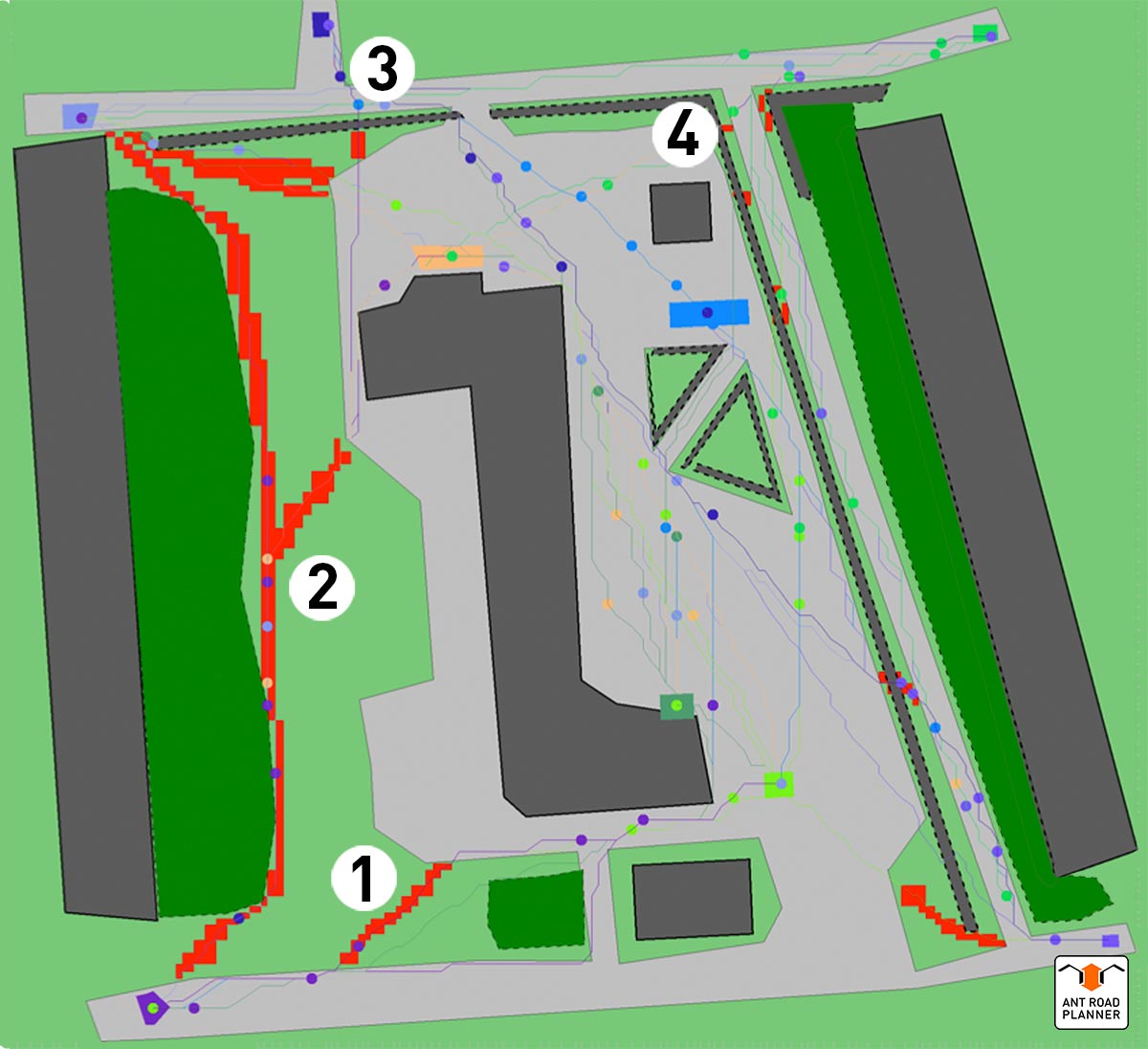
Попробуем применить алгоритм наоборот: спрогнозировать потоки и предусмотреть остро необходимые тротуары. Запустим симулятор на проектируемом Мастерской КСП микрорайоне и посмотрим, насколько удачно были спланированы пешеходные дорожки:

1. Основные направления проектировщики Мастерской КСП предугадали верно, руководствуясь здравым смыслом и опытом. Кроме того отметим, что в данном примере проектировщики поступили нестандартно, и связали большую часть подъездов с выходом из двора – не под прямым углом к стенам домов.
2. Есть дорожки, например от многоуровневого паркинга в южной части микрорайона (обозначены цифрой 1), которые явно стоит сместить.
3. В скверах и рядом со спортивными площадками необходимы дополнительные дорожки (обозначены цифрами 2).
Конечно добавить несколько настолько необходимых дорожек на этапе проектирования эскиза планировочной организации микрорайона не составит труда. А польза для будущих жителей микрорайона будет неоценима.
Выводы
Давайте представим, что таким образом тестируется каждый проектируемый микрорайон города: пешеходные дорожки будут удобны и не появится вытоптанных газонов. Для этого проектировщикам не придется выдумывать схему пешеходных маршрутов, достаточно подготовить файл и загрузить в созданный нами симулятор – дальнейший расчет произведет сервер Ant Road Planner.
Основные направления применения Ant Road Planner:
- Упрощение и ускорение проектирования тротуаров при планировки новых микрорайонов
- Проверка предлагаемых тротуаров и пешеходных дорожек при проектировании благоустройства дворов, парков и скверов, прилегающих территорий остановок общественного транспорта
Общая выгода – симуляция помогает избежать критических ошибок при проектировании тротуаров.
Выгода для проектировщика – экономия времени на проектирование тротуаров, а также повышение качества проекта.
Выгода для заказчика – простой способ проверить все ли пешеходные связи на месте.
Выгода для девелопера – информация об основных пешеходных потоках в микрорайоне поможет правильно расположить будущие магазины шаговой доступности, так называемый street retail.
Выгода для пешехода – учитываются его реальные и подсознательные интересы – сократить свой путь.
Сейчас наш симулятор доступен для ограниченного тестирования на сайте antroadplanner.ru – мы приглашаем проектировщиков и энтузиастов проверить свои районы и дворы.